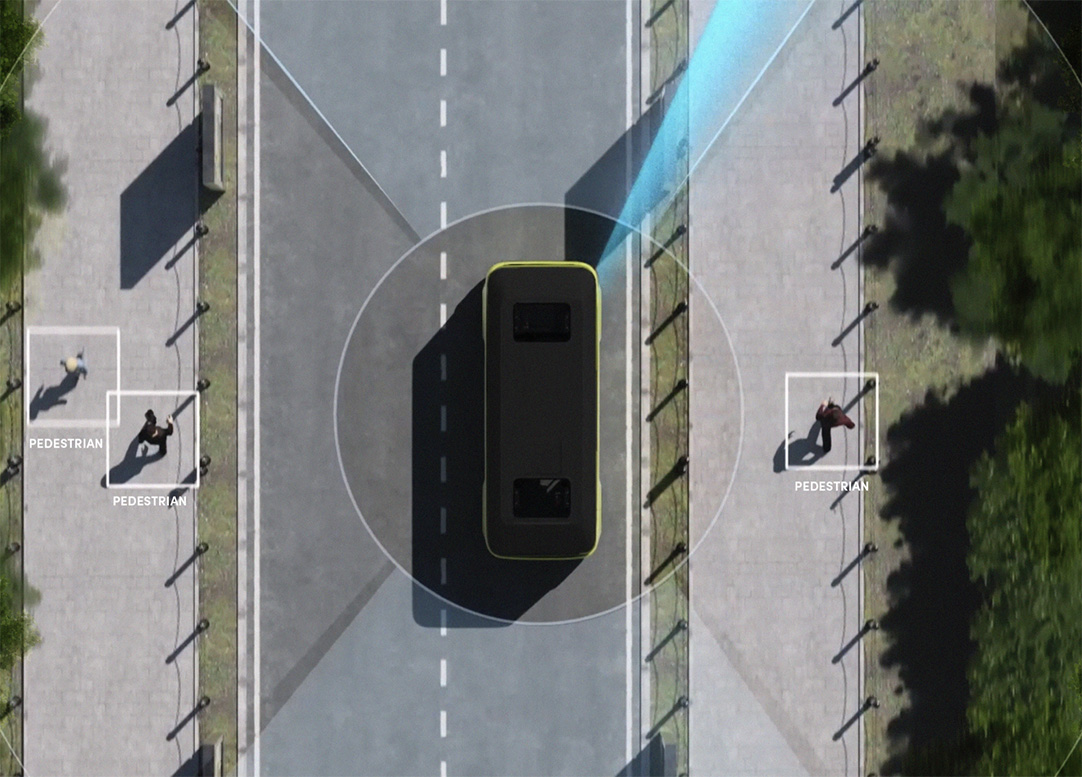
Broad application of sensors
The vehicle will be equipped with 7 lidars, 11 video cameras,
4 radars, 3 GNSS receivers and an IMU. The sensors will
cover the entire area around the vehicle and provide an enhanced orientation in the area and the current traffic conditions. Since they will operate at different ranges, the minibus will be responsive in varying light and weather conditions. Additionally, the ranges of sensors overlap, which increases security if any of them gets damaged.